 Pagina Inicial
Notícias
Projetos
Chamada de Bolsistas
Pesquisadores
Estudantes
Eventos
Conferencias
Galeria de Fotos
Galeria de Vídeos
Links
Pagina Inicial
Notícias
Projetos
Chamada de Bolsistas
Pesquisadores
Estudantes
Eventos
Conferencias
Galeria de Fotos
Galeria de Vídeos
Links
Projetos
Sapiens
Sapiens - Sustentabilidade e Eficiência através de Tecnologias com Foco no Consumidor para Smarts Grids
Missão, Visão e Valores

Parceiros:



Patrocinador:

Eduardo Henrique Maciel - Lattes
Doutorando em Engenharia Elétrica pela Universidade Federal do Rio Grande do Sul (UFRGS)
Fernanda Mota - Lattes
Doutoranda em Educação em Ciências: Químida da Vida e Saúde pela Universidade Federal do Rio Grande (FURG)
Fernando Pereira de Tôledo - Lattes
Mestrando em Modelagem computacional pela Universidade Federal do Rio Grande (FURG)
Jonas Casarin - Lattes
Mestrando em Engenharia de Computação pela Universidade Federal do Rio Grande (FURG)
Robledo Castro - Lattes
Graduando em Sistemas de Informação pela Universidade Federal do Rio Grande (FURG)
O Projeto Sapiens tem como objetivo o estudo e desenvolvimento de metodologias e tecnologias capazes de incluir o consumo como elemento inteligente em Smart Grids sustentáveis e eficientes de forma a contribuir para o desenvolvimento científico e tecnológico e a inovação do Setor Elétrico Brasileiro. De forma mais específica, propõe-se a atingir os seguintes objetivos e metas:
- Definição de uma taxonomia de métodos para automação do consumo residencial de energia, considerando os aspectos psicológicos associados à motivação do indivíduo para a conscientização de consumo sustentável (mudança de comportamento);
- Realização de Estudo de Caso de forma a estudar e avaliar os diferentes perfis de consumo individual em residências, possibilitando a obtenção de metodologia para a elaboração de gatilhos motivacionais de posturas conscientes de consumo;
- Desenvolvimento de Protótipo Smart Trigger, a ser integrado em domicílios presentes em Smart Grids (30 residências no Brasil), capaz de motivar o usuário a realizar um consumo consciente de energia elétrica, além de funcionalidades de monitoramento do consumo e atuação remotos em tempo real via web apps, SMS e smartphones (iOS e Android);
- Realização de Estudo de Caso de forma a estudar e avaliar os diferentes perfis de automação de consumo, possibilitando a obtenção de metodologia para a obtenção de diferentes níveis de automação visando um consumo inteligente e automatizado;
- Desenvolvimento de Protótipo Sapiens, o qual tendo como base o Smart Trigger, adiciona a este a possibilidade de adotar diferentes níveis de automação do consumo, permitindo a realização de operações e controles autônomos (sem interferência explícita do usuário);
- Realização de Estudo de Caso de forma a testar e validar a metodologia e o Protótipo Sapiens como quarta etapa do processo de Fornecimento de Energia em um escopo Smart Grid.
Arquitetura do Sapiens

- User: Consumidor de energia elétrica.
- Sensor: Plugs que verificam o consumo de energia elétrica, sensor de presence, câmera;
- Perception: Este modulo é composto pelos elementos monitor que recebe o consumo de energia elétrica dos plugs via protocolo Zigbee e raspberryPI que recebe os dados do monitor da camera e do sensor de presence;
- User Model: Este modulo possui os seguintes elementos:
-
-
Motivação: receberá um feedback com os dados de consumo em tempo real e também receberá uma trigger na forma de mensagem prazeirosa que possibilita ao consumidor ter esperança de contribuir com a preservação do ambiente por meio do uso sustentável de energia elétrica.
-
Habilidade: o usuário deve ter como habilidade os seguintes fatores de simplicidade: tempo para manusear o sensores, dinheiro para comprar os sensores, ciclos do cérebro para aprender a manusear os componentes da arquitetura e estar disposto a sair da rotina para mudar o seu comportamento.
-
- Actuator: neste modulo o RaspberryPI é o responsável por enviar comandos para o modulo sensor;
- Sapiens: modulo responsável por fornecer dois tipos de saída (gatilhos e ações inteligentes);
-
Smart Action: modulo que envia comandos para ligar/desligar os equipamentos que estão conectados aos sensores.
-
Triggers: O recurso terá os seguintes formatos:
-
Spark: Esta trigger sera enviada na forma de mensagens para o usuário;
-
Facilitador: Esta trigger é enviada de duas formas: na forma de acionamento (permitir que o consumidor ligue e desligue os equipamentos) e na forma de mensagens;
- Signal: Esta trigger será enviada no formato de mensagem para verificar se o usuário ainda tem habilidade e motivação para utilizar o sistema.
-
Visita e apresentação do projeto a alunos do colégio Jardim de Sol
3DCS Tecnologias Avançadas de Automação e controle para supervisão de Sub- sistemas Marítimos (FINEP)
Objetivo Geral:
Alinhado a estratégia de crescimento do laboratório Nautec- FURG e da empresa Altus na área de óleo e gás, o projeto 3DCS visa desenvolver um sistema de controle distribuído modular de alta disponibilidade e integrado com sistemas de supervisão, de forma a promover soluções para o monitoramento, automação e controle de subsistemas marítimos. De formar mais precisa, o desenvolvimento do sistema 3DCS passará pela realização dos seguintes sub- projetos: Modulo de visualização distribuída por visão, visualização móvel para DCS e internet industrial para serie de CLPs nexto e certificação DNV e UL dos CLPs nexto.
Financiadores:
SCIT - Secretaria da Ciência, Inovação e Desenvolvimento Tecnológico
FINEP- Agência Brasileira da Inovação
André Mendes da Rosa - Lattes
Mestre em Engenharia da Computação pela Universidade Federal do Rio Grande (FURG)
Eduardo Schmidt Fernandes dos Santos - Lattes
Mestre em Engenharia da Computação pela Universidade Federal do Rio Grande (FURG)
Marcos André do Amaral Bichet - Lattes
Mestre em Modelagem Computacional pela Universidade Federal do Rio Grande (FURG)
Mario Ricardo Nascimento Marques Junior - Lattes
Graduando em Engenharia de Automação pela Universidade Federal do Rio Grande (FURG)
Natanael Garcia Rodrigues - Lattes
Mestrando em Engenharia da Computação pela Universidade Federal do Rio Grande (FURG)
William Bonow Xavier - Lattes
Graduando em Engenharia de Automação pela Universidade Federal do Rio Grande (FURG)
O Projeto 3DCS nasceu de uma parceria entre a Universidade Federal de Rio Grande – FURG com sua vocação para o estudo das Ciências do Mar, aliado ao desenvolvimento tecnológico em robótica e automação alcançado pelo seu Centro de Ciências Computacionais (C3) e seu Grupo de Automação e Robótica Inteligente (NAUTEC) com a Altus Sistemas de Automação S/A, uma das principais organizações brasileiras no setor de informática e líder na pesquisa e desenvolvimento de tecnologias para automação industrial e controle de processos.
O projeto busca o desenvolvimento de componentes de software, que possam ser integrados a plataformas de supervisão (SCADA) para utilização em aplicações marítimas, industriais e automações de modo geral. O objetivo geral deste projeto é criar novas formas de visualização e interação entre estes ambientes de supervisão e dispositivos de campo, através de recursos 3D, virtualização, realidade aumentada e visão computacional. O projeto está subdividido em 3 subprojetos: 3DCS, MDCS e VDCS.
O subprojeto 3DCS tem por objetivo a criação e controles básicos para visualização de objetos e cenas 3D, técnicas de relacionamento entre ambientes 2D e 3D, além da documentação técnica associada (Manuais e Tutoriais).
Por sua vez, o subprojeto MDCS utiliza técnicas de realidade aumentada para visualização de informações associadas a equipamentos no ambiente de operação, através da identificação deste por um marcador visual específico, podendo estas informações serem acessadas por um equipamento móvel do tipo tablet ou smartphone.
Ainda dentro do subprojeto MDCS, existe a possibilidade de se utilizar a leitura de marcadores para recriar um equipamento em um modelo 3D em um processo de virtualização, visando facilitar a identificação de componentes através da realidade virtual.
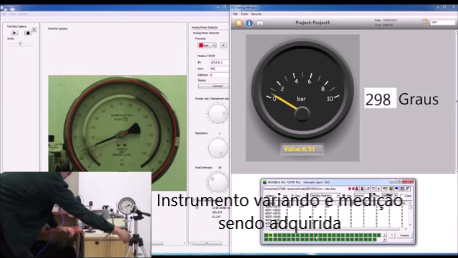
Por fim, o subprojeto VDCS visa a utilização de técnicas de visão computacional para medição e monitoração de estados e valores disponibilizados por instrumentos de campo, permitindo a extração desta informação e utilização no sistema SCADA, criando assim o conceito de virtualização de instrumentos de campo com os chamados “Instrumentos Virtuais”.
Modelos 2D e 3D do Subprojeto 3DCS
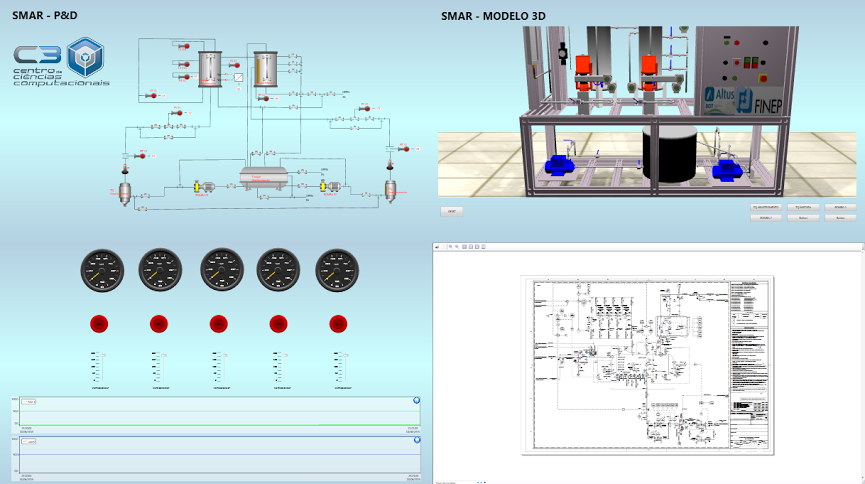
Imagem do projeto MDCS das informações que são lidas em um Tablet
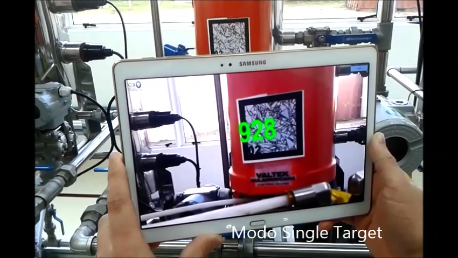
Modelo 3D em Realidade Aumentada do Subprojeto MDCS
Medidas de leitura por meio de Visão Computacional do Subprojeto VDCS
Artigos Completos Publicados em Periódicos
RAPACCINI, M.; PORCELLI, I. ;?ESPÍNDOLA, D. B.?;?PEREIRA, C. E. Evaluating the use of mobile collaborative augmented reality within field service networks: the case of Océ Italia Canon Group. Production & Manufacturing Research: An Open Access Journal, v. 2, p. 738-755, 2014.
ESPÍNDOLA, D.; DUARTE, N.; BOTELHO, S. S. C.; PEREIRA, C. E. A model-based approach for data integration to improve maintenance management by mixed reality. Computers in Industry, p. 1-16, 2013
Resumos publicados em anais de congressos
SANTOS, R. A. P. ;BOTELHO, S. S da C?; BICHET, M. A. A. ; DUARTE, N. ;?ESPINDOLA, D. B. Toogle: Uma plataforma CPS para o rastreio de equipamentos em estaleiros. In: II Symposium on Computing and Automation for Naval, Offshore and Subsea Industry, 2014, Rio Grande. II Symposium on Computing and Automation for Naval, Offshore and Subsea Industry, 2014.
BICHET, M. A. A. ;BOTELHO, S. S da C?;ESPINDOLA, D. B.?; TAVARES, D. ; SILVEIRA, J. SCADA Móvel: Uso de Sistema Supervisório Móvel em Plantas Navais e OffShore. In: II Symposium on Computing and Automation for Naval, Offshore and Subsea Industry, 2014, Rio Grande. II Symposium on Computing and Automation for Naval, Offshore and Subsea Industry, 2014.
Resumos publicados em anais de congressos (artigos)
BICHET, M. A. do A.?;FREITAS, E. K. H. de; ROCHA, R. S.; NUNEZ, A.; SCHROEDER, G. N.; SANTOS, R. A. P. dos ; BOTELHO, S. S. da C. Utilization of Hyper Environments for Tracking and Monitoring of Processes and Supplies in Construction and Assembly Industries. In: 2013 Symposium on Computer and Automation for Offshore Shipbuilding (NAVCOMP), 2013, Rio Grande. 2013 Symposium on Computing and Automation for Offshore Shipbuilding, 2013. p. 81.
Apresentações de Trabalho
SANTOS, R. A. P. ; BICHET, M. A. A. ; DUARTE, N. ;?BOTELHO, S. S da C?;?PEREIRA, C. E.; ZUCCOLOTTO, M. ; FRAZZON, E. M. ;?ESPÍNDOLA, D. B. Visualization tool for cyber-physicalmaintenance systems. 2014. (Apresentação de Trabalho/Conferência ou palestra).
RODRIGUES, N. G.?Uma Arquitetura para Integração entre Sistemas Supervisórios e Realidade Aumentada. 2014. (Apresentação de Trabalho/Seminário).
Livros Publicados/Organizados ou Edições
PORCELLI, I. ; RAPACCINI, M. ;ESPÍNDOLA, D. B.?; PEREIRA, C. E. Innovating Product-Service Systems Through Augmented Reality: a Selection Model. In: YoshikiShimomura;KojiKimita. (Org.). The Philosopher's Stone for Sustainability. 1ed.Tokyo: Springer Berlin Heidelberg, 2013, v. 1, p. 137-142.
Trabalhos Completos Publicados em Anais de Congressos
PENNA, R.?;?BOTELHO, S. S. C.?;?DUARTE, N.?;?ESPÍNDOLA, D.?; BICHET, M. A. ; FRAZZON, E. ;?pereira, c. e.; ZUCCOLOCO, M. Visualization tool for cyber-physical maintenance systems. In: IEEE International Conference on Industrial Informatic, 2014, Porto Alegre. Indin 2014, 2014. v. 1. p. 1-6.
PENNA, R.?; BICHET, M. A.;?BOTELHO, S. S da C?;?DUARTE, N. L.?;?ESPINDOLA, D. B. Toogle: Uma plataforma CPS para o rastreio de equipamentos em estaleiros. In: Simpósio em Computação e Automação para Indústria Naval, Offshore, 2014. Simpósio em Computação e Automação para Indústria Naval, Offshore, 2014. p. 1-6.
ESPINDOLA, D. B.?BOTELHO, S. S da C;?WEIS, A. A.; BOTELHO, S. S da C ; PEREIRA, C. E. Interface Móvel de Visualização Avançada aplicada a Sistemas da Indústria Naval. In: NAVCOMP - Simpósio em Computação e Automação para Indústria Naval, Offshore e Subaquática, 2013, Rio Grande. Anais do II WES Workshop em Sistemas Embarcados e NAVCOMP Simpósio em Computação e Automação para Indústria Naval, Offshore e Subaquática, 2013. v. 1. p. 97-101.
ESPINDOLA, D. B.?;PEREIRA, C. E. ; SCHNEIDER, E. L. ;?HENRIQUES, R. V. B?. Improving Maintenance Operations Through Application of Mixed Reality Systems. In: Intelligent Manufacturing Systems, 2013, Sao Paulo. Proceedings of the 11th IFAC Workshop on Intelligent Manufacturing Systems (IMS 13), 2013. v. 1. p. 1-6.
PORCELLI, I. ;RAPACCINI, M. ;ESPINDOLA, D. B.?; Pereira, C. E. Technical and Organizational Issues about the Introduction of Augmented Reality in Maintenance and Technical Assistance Services. In: Intelligent Manufacturing Systems, 2013, Sao Paulo. Proceedings of the 11th IFAC Workshop on Intelligent Manufacturing Systems (IMS 13), 2013. v. 1. p. 1-6.
Dissertações e Teses
SANTOS, E. S. F. dos. Sensor Visual: Mensuração de Instrumento de Ponteiro a Partir de Vídeo. Dissertação de Mestrado em Engenharia da Computação, Universidade Federal do Rio Grande, maio de 2015. Orientador: Prof. Dr. Adriano Velasque Werhli.
SILVA, B. Visualização e Acesso a Informação em Plantas Industriais: Uma Aplicação da Realidade Aumentada Móvel. Dissertação de Mestrado em Engenharia da Computação, Universidade Federal do Rio Grande, abril de 2014. Orientadora: Profa. Dra. Danúbia Bueno Espíndola.
NAUTILUS - Tecnologias de Automação e Computação para o Aumento da Competitividade em Estaleiros
Bruno Quaresma Leonardo - Lattes
Engenheiro de Automação pela Universidade Federal do Rio Grande (FURG)
Cristiano Rafael Steffens - Lattes
Mestre em Engenharia de Computação pela Universidade Federal do Rio Grande (FURG)
Sidnei Carlos da Silva Filho - Lattes
Graduando em Engenharia de Computação pela Universidade Federal do Rio Grande (FURG)
Eduardo do Amaral Leivas - Lattes
Graduando em Engenharia de Computação pela Universidade Federal do Rio Grande (FURG)
Fernando da Fonseca Schneider - Lattes
Graduando em Engenharia de Automação pela Universidade Federal do Rio Grande (FURG)
Jusoan Lang Mór - Lattes
Mestrando em Engenharia de Computação pela Universidade Federal do Rio Grande (FURG)
Marcio Rozante Aguiar - Lattes
Graduando em Engenharia de Automação pela Universidade Federal do Rio Grande (FURG)
Sibyla Andreuchetti Vioto e Silva - Lattes
Graduando em Engenharia de Computação pela Universidade Federal do Rio Grande (FURG)
Valquíria Hüttner - Lattes
Graduanda em Engenharia de Computação pela Universidade Federal do Rio Grande (FURG)
Ygor Quadros de Aguiar - Lattes
Graduando em Engenharia de Automação pela Universidade Federal do Rio Grande (FURG)
Objetivos:
O projeto busca introduzir melhorias no processo de soldagem através da automação e robotização. Como objetivo geral, busca-se fomentar a colaboração multidisciplinar das equipes envolvidas, resultando na formação de recursos humanos qualificados e com uma visão multifacetada dos grandes desafios atuais da indústria naval e offshore brasileira.O projeto prevê a customização das soluções atualmente utilizadas, bem como o desenvolvimento de novos equipamentos e soluções. Os objetivos específicos do projeto são:
- Estudo do estado-da-arte em robótica para solda de chapas de aço, sobretudo associado aos aspectos de automação e computação voltados a sistemas de percepção e controle em malha fechada;
- Desenvolvimento de projeto de hardware e software para extração de características dimensionais do chanfro e desenvolvimento de robô de solda linear, adaptado a diferentes conformações de cordões de solda;
- Desenvolvimento de sistema de correção de trajetória capaz de realizar operações de soldagem com controle em tempo real e malha fechada, conforme percepção online do processo;
- Teste e validação da ferramenta robótica em campo, em operações de soldagem a serem realizadas no Estaleiro Rio Grande.
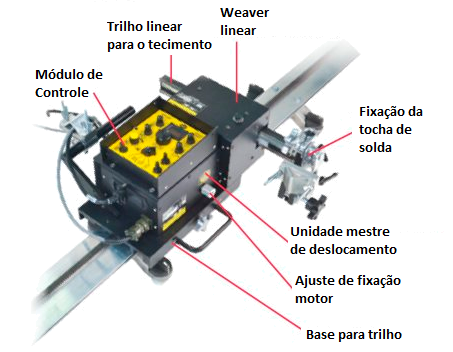
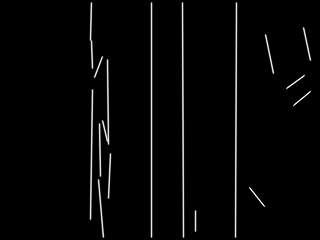
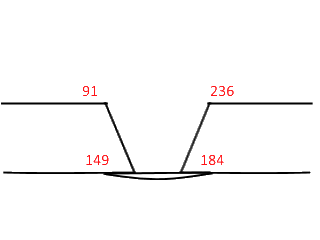
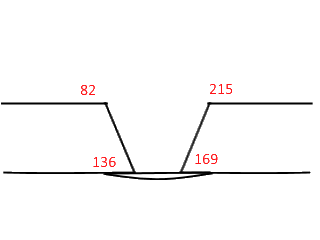
A qualidade da soldagem de arco eléctrico é altamente dependente da parametrização do equipamento. Tensão, corrente, velocidade do trator, posição da tocha, velocidade de alimentação do arame e a movimentação da tocha, entre outros parâmetros, quando não devidamente configurados, podem resultar em deformação da chapa, respingos de solda, escória e fumo. Para minimizar estes problemas, o projeto propõe-se um sistema VBM (Video Based Measurement) para reconhecer a geometria dos chanfros, ajustando automaticamente as configurações corretas para cada operação de soldagem. Usando visão computacional, o sistema estima o volume 3D do chanfro de soldagem, mapeando a geometria do chanfro em atitudes de controle para o processo de soldagem. O sistema é testado e validado no robô Bug-O Matic weaver.
Interface de controle manual do robô Bug-O Matic Weaver
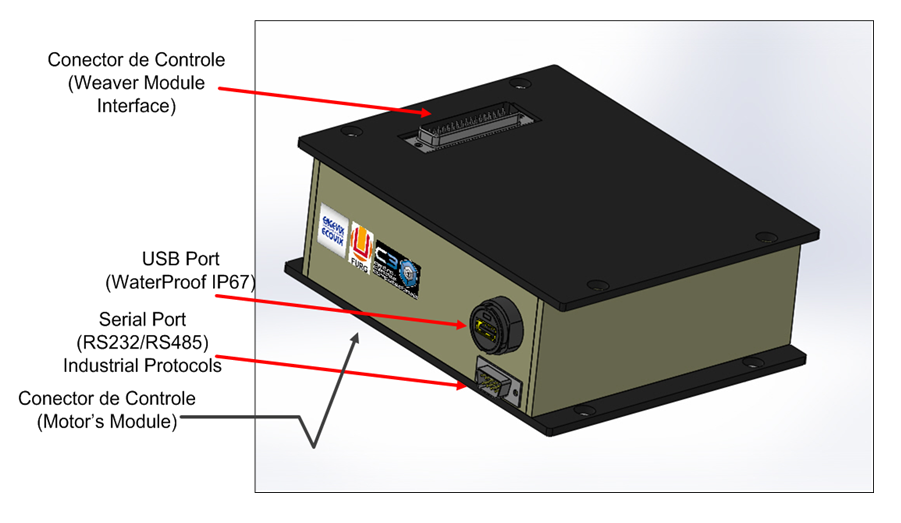
Módulo de controle automatizado do robô
- Imagens Iniciais do robô
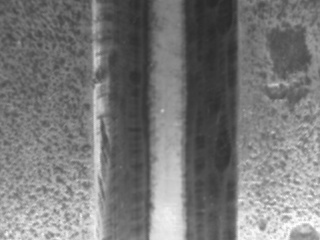
- Imagens processadas
-
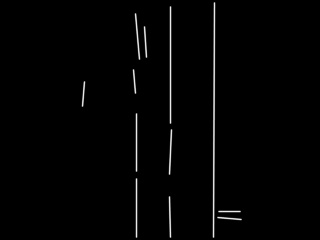
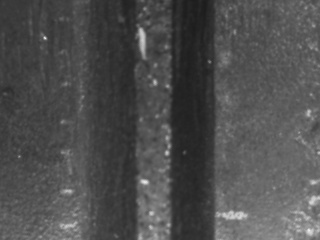
- Resultado dos processamentos nas imagens
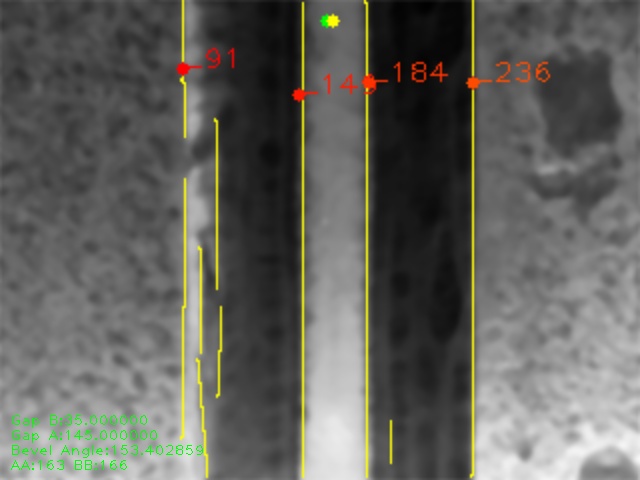
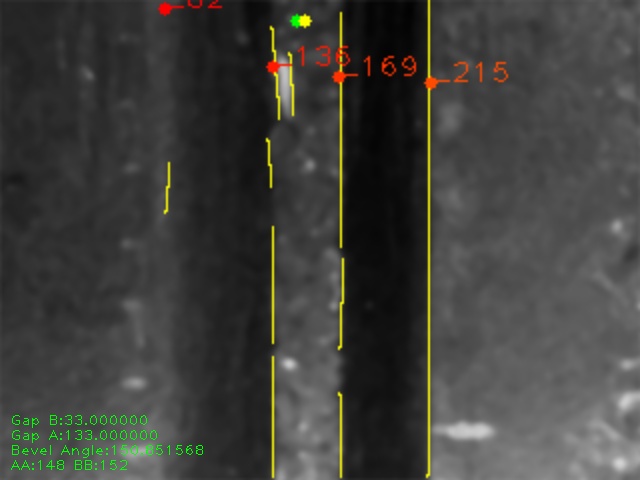
- Resultados dos processamentos
- Estágios iniciais do controle do alimentador de arame e transformador
Trabalhos completos aceitos em congressos
STEFFENS, C. R.; LEONARDO B. Q.; SILVA, S. d.; HUTTNER, V.; AGUIAR, M. R; LEIVAS, E. d. A.; ROSA, V. S.; BOTELHO, S. S. C. Automated control module based on VBM for shipyard welding applications: Study case on the Bug-O Matic Weaver. In LARS/SBR 2015 I, oct 2015.
STEFFENS, C. R.; LEONARDO B. Q.; SILVA, S. d.; HUTTNER, V.; AGUIAR, M. R; LEIVAS, E. d. A.; ROSA, V. S.; BOTELHO, S. S. C. A VMB System for Intelligent Robotic Welding. In SBAI – Simpósio Brasileiro de Automação Inteligente, 2015.
Nautilus Log
Objetivo Geral:
Identificação e avaliação do fluxo de produção a partir de tecnologias para rastreio de operações e mineração de dados, assim auxiliando para o aumento de produtividade e competividade da industria offshore brasileira.
Financiadores:

Adelmo Barbosa
Graduando em Engenharia de Computação pela Universidade Federal do Rio Grande (FURG)
Gabriel Lavoura dos Santos - Lattes
Graduanda em Engenharia da Computação pela Universidade Federal do Rio Grande (FURG)
Isadora Souza - Lattes
Graduanda em Engenharia de Computação pela Universidade Federal do Rio Grande (FURG)
Lucas Barbosa Parzianello - Lattes
Graduando em Engenharia da Computação pela Universidade Federal do Rio Grande (FURG)
Marcelo Takashi Rodrigues Ishikame - Lattes
Graduando em Engenharia da Automação pela Universidade Federal do Rio Grande (FURG)
Thiago Manuel Fortunato da Costa - Lattes
Mestrando em Engenharia da Computação pela Universidade Federal do Rio Grande (FURG)
Vanessa Telles da Silva - Lattes
Graduando em Engenharia da Automação pela Universidade Federal do Rio Grande (FURG)
O projeto tem como objetivo a identificação e avaliação do fluxo de produção a partir de tecnologias para rastreio de operações e mineração de dados, assim auxiliando para o aumento de produtividade e competividade da industria offshore brasileira. Nautilus LOG é dividido em três partes:
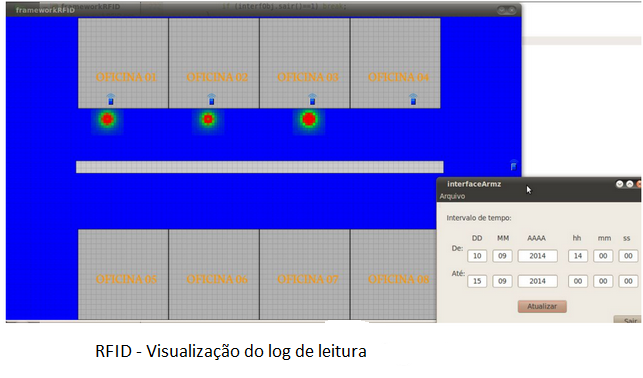
- Um sistema para rastreios de ativos utilizando a tecnologia RFID (Radio-Frequency IDentification);
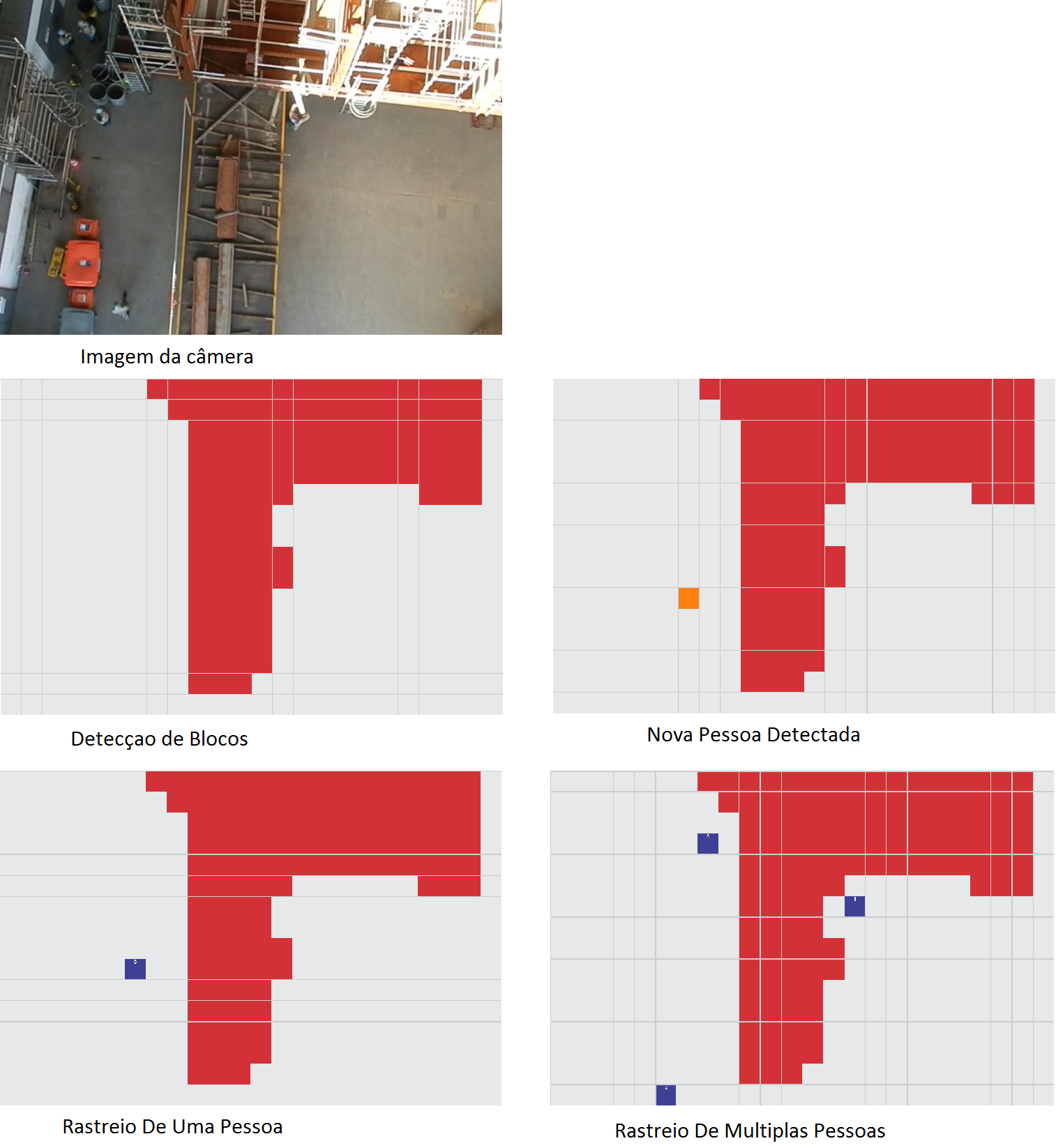
- Um sistema utilizando visão computacional para rastreio de entes;
- Um framework permitindo a integração de ambos sistemas em uma interface.
Utilizando da tecnologia RFID o sistema auxilia no rastreio de ativos, demonstrando os mesmos em um ambiente gráfico mapeado e gerando um relatório com suas posições, assim facilitando a localização e identificação a evolução da cadeia de produção.
Com a visão computacional, visamos o rastreio de entes, identificando as pessoas em uma determinada área demonstrando graficamente e gerando relatórios para auxiliar a contabilidade de HH (homem-hora) e evolução de processo.
Rastreio de entes em chão de fábrica
Visualização do Log de ativos
Rastreio de Objetos
Teste em Arduíno
Hiperambientes - Robótica e Automação Pervasivas e Ubíquas em Missões Subaquáticas e Subterrâneas
Descrição: Em decorrência do grau de encapsulamento, comunicação e autonomia dos componentes de hardware surge na computação um recente paradigma associado a possibilidade de pervasividade e ubiquidade. A computação Ubíqua e Pervasiva congrega novas formas de interação humano computador, onde o computador se integra ao dia-a-dia da sociedade em "qualquer momento'' e em "qualquer lugar''. Busca-se tornar a interação homem-máquina invisível, ou seja, integrar a computação com as ações e comportamentos naturais dos indivíduos. Avanços em dispositivos móveis de processamento e comunicação, dispositivos de interatividade e realidade virtual são aportes tecnológicos catalisadores deste processo. De uma forma mais abrangente, tais conceitos de ubiquidade e pervasividade podem ser extendidos a outras tecnologias. Por exemplo, se antes restritos a tarefas repetitivas em indústrias, sistemas robóticos, com capacidade de percepção, tomada de decisão e atuação, começam a fazer parte cada vez mais do cotidiano da sociedade. Atualmente pode-se conceber a possibilidade de ambientes multi-tecnológicos compostos por redes de identificadores (Radio-frequency Identifiers - RFIDs), sensores e atuadores robóticos. Ambientes colaborativos podem envolver robôs e humanos (e seus avatares), estando estes em difentes espaços geográfico-temporais. Assim, da mesma forma que na computação ubíqua a computação está presente em todo local, neste novo contexto, aqui denominado de Robótica e Automação Ubíqua e Pervasiva, diferentes recursos tecnológicos de percepção e atuação estariam por todo o local, percebendo e atuando de forma autônoma "em qualquer momento'' e em "qualquer lugar''. Nesta perspectiva, a presente proposta busca identificar e tratar os desafios associados ao desenvolvimento de ambientes multi-tecnológicos, aqui denominado de Hiperambientes, para a Robótica e Automação Ubíquas. Estes seriam compostos por elementos reais, virtuais, redes de identificadores, sensores e atuadores robóticos a.
Tecnologias Não-Restritivas para o Esporte e Lazer
Descrição: O projeto prevê o estudo de técnicas de inteligência artificial e desenvolvimento de tecnologias ubiquas e pervasivas para aplicação em Esporte e Lazer. O projeto prevê o desenvolvimento de um framework que envolve o uso de diferentes tipos de dispositivos de interface, mais precisamente redes de sensores e atuadores, que são integrados de forma a formar smart environments. O framework, denominado hiperambiente, admite a interligação de diferentes nodos em uma estrutura em rede. O hiperambiente será aplicado no desenvolvimento de cenários para esporte e lazer, permitindo a exploração de diferentes modalidades da educação física, sem restrições de infraestrutura e mobilidade física.
Khairos - Visualização Cientifica e de Engenharia aplicada Modelagem Computacional de Sistemas Complexos Naturais e Artificiais
Descrição: O presente projeto se propõe a avançar no provimento de recursos materiais e humanos em condições de envolvimento com modelagem computacional e visualização cientifica e de engenharia, ambito de diferentes areas do conhecimento. O desenvolvimento e a utilização de sistemas computacionais capazes de analisar, resolver e simular problemas difíceis seriam as tarefas a realizar. Além de passar pelo desenvolvimento de modelos fisico-matemáticos que envolvam grandes quantidades de operações de cálculo, a simulação de aspectos naturais e artificiais que convivam com grandes incertezas e a estruturação de grandes quantidades de dados para garimpo de informações, o projeto focaliza-se no estudo, desenvolvimento e disponibilização de técnicas de visualização cientifica e de engenharia capazes de extrair informações de grandes conjuntos de dados. Aspectos relativos a desenvolvimento de ontologias, visualização colaborativa, imersividade, representação de erros e incertezas, interação homem-máquina e arquiteturas para visualização serão abordados.
SimulaEdif - Sistema de Simulação de Processos de Pré-edificação e Edificação de Navios de Grande Porte
Descrição: Desenvolvimento de um sistema para simulação de processos de pré-edificação e edificação de navios de grande porte. O sistema vai desenvolver e empregar uma estrutura hierárquica de produtos padrão (PWBS) para determinadas classes de navios e será baseado na plataforma DELMIA QUEST. Aplicação na elaboração de modelos voltados para o planejamento de de instalações e layout de estaleiros, estratégias de construção e sequenciamento de atividades. Desenvolvimento de ambiente de visualização avançado, especificamente para movimentação de blocos, pre-edificação e edificação. O projeto consiste no desenvolvimento de ferramentas e aplicação no ambiente da construção naval do Brasil, a partir do Projeto LABSEN apoiado pela FINEP e CENPES/Petrobras.
SISCON - Sistema de Acompanhamento e Controle da Construção Naval
Descrição: Desenvolvimento de um sistema de controle e acompanhamento de obras de construção naval, baseado em técnicas avançadas de computação e automação para supervisão de campo. Implantação de um protótipo em um ambiente real de construção naval.
SACI - Sistema Avançado de Supervisão, Inspeção e Diagnóstico de Sistemas Elétricos: Geração, Transmissão e Distribuição
Descrição: Desenvolvimento de arquitetura de hardware e software para monitoramento, diagnótico e prognóstico da vida útil para equipamentos do sistema elétrico de potência, mais precisamente condutores dedicados a geração, distribuição baseada em redes de sensores móveis composta por robôs móveis de inspeção aérea e subterrânea.
Sistema de Inspeção de Redes de Distribuição Subterrâneas
Descrição: Desenvolvimento de sistema de inspeção visual envolvendo diferentes sensores para a inspeção e avaliação de cabos de energia subterrâneos. Avaliação de diferentes tipos de sensores, desenvolvimento de hardware de aquisição e sistema robótico para navegação tele-operada.
AMADEUS 3 - Sistema de Medição para Redução de Perdas Comerciais
Descrição: Desenvolvimento de estratégias de automação visando a redução de perdas comercias. O sistema será comporto de grid de sensores domicialiares.
Previsão de Demanda baseado em análise de série temporais multi-variadas
Descrição: Previsão de demanda através de técnicas de predição temporal multi-variadas. Desenvolvimento de ferramenta computacional envolvendo análise de serie temporais multi-variadas a ser utilizada pela Companhia Estadual de Energia Elétrica - CEEE.
Modelagem Climática Regional Aplicada
Descrição: Desenvolvimento de técnicas computacionais avançadas para a modelagem climática regional aplicada. Desenvolvimento de técnicas avançadas de computação para previsão climática.
TELE-P ROBOTAR - Construindo Multi-Ambientes de Realidade Aumentada com Robôs, Humanos e Avatares
Descrição: O projeto ROBOTAR pretende de forma mais específica tratar uma série de questões associadas principalmente ao rastreio de múltiplos agentes envolvidos na cena a ser reproduzida, a previsão de pose dos agentes a serem teleoperados e a implementação da tele-presença seja por acionamento de sistemas robóticos e/ou renderização de avatares.
Portando Ambientes 3D Interativos para TV Digital Brasileira
Descrição: Desenvolvimento de padrão para ambientes 3D (X3D) para TV Digital.
SAP-RISCO - Visualização
Descrição: Desenvolvimento de ferramenta gráfica para acompanhamento de projetos de construção naval.
Manuteção Inteligente de Usinas Geradores de Energia Elétrica
Descrição: Estudo e desenvolvimento de técnicas para manuteção inteligente de usinas geradores de energia elétrica.
TATUBOT - Sistema Robótico De Inspeção Para Linhas De Distribuição Subterrâneas
Descrição: Desenvolvimento de robô para inspeção de dutos de distribuição de energia elétrica. Geração, transmissão, distribuição e uso final de energia elétrica.
Análise de padrões de escoamento de polímeros
Descrição: Utilização de técnicas de visão computacional para a análise de padrões de escoamento de polímeros.

